研究室探訪vol. 18 [立命館大学 センサ知能統合研究室(下ノ村研究室)]下ノ村 和弘 教授
あの研究室はどんな研究をしているのだろう? そんな疑問に答える“研究室探訪”。
今回は,立命館大学 センサ知能統合研究室(下ノ村研究室)にお伺いしました。

今回は,立命館大学 センサ知能統合研究室(下ノ村研究室)にお伺いしました。
画像センシング技術とロボット知能化技術
下ノ村研究室では,センサーデバイスやカメラ,画像処理アルゴリズムの開発,ロボット制御や生体情報計測への応用,また,生体視覚系のモデリングなど,電子・情報・生物・機械の融合領域で,幅広いテーマに取り組んでいる。下ノ村 和弘 教授
2004年 大阪大学大学院 工学研究科 電子工学専攻 修了 2004年 科学技術振興機構 研究員 2004年 大阪大学 先端科学イノベーションセンター 特任研究員 2005年 大阪大学 臨床医工学融合研究教育センター 特任講師 2009年 立命館大学 理工学部ロボティクス学科 准教授 2018年 立命館大学 理工学部ロボティクス学科 教授
2004年 大阪大学大学院 工学研究科 電子工学専攻 修了 2004年 科学技術振興機構 研究員 2004年 大阪大学 先端科学イノベーションセンター 特任研究員 2005年 大阪大学 臨床医工学融合研究教育センター 特任講師 2009年 立命館大学 理工学部ロボティクス学科 准教授 2018年 立命館大学 理工学部ロボティクス学科 教授
[研究テーマ1]触覚センシングに基づくロボット作業
産業用ロボットが工場で活躍し自動化が進む一方,いまだ人の手により行われている作業も多い。例えば,様々なパーツを組み合わせる機械や電子製品の組み立て作業,様々な種類の食材を扱う弁当詰め作業などはその典型的な例であり,ティーチング・アンド・プレイバック方式による繰り返し動作では難しい。ロボットがこのような作業を実行するために不可欠な要素のひとつは,人の手や指先のような,高度な触覚であろうと考えている。ロボットの触覚センサーには,しばしば高い空間分解能が求められる。例えば,手でネジを持ったとき,そのネジの位置や向きを知るためには,ネジが指先のどこにどのような向きで接触しているかを知る必要がある。これには,指先に,十分な数の計測点が十分に密に配置されていることが必要である。高い空間分解能をもった触覚センサーを実現するために,カメラを用いて,触覚情報を画像として取得する,触覚画像センサーについて研究している。本研究室で開発した触覚画像センサーを取り付けたグリッパをロボットに搭載し,触覚のみに基づいてボルト挿入作業を行った。触覚センサーによるハンド内ボルト位置・姿勢計測の結果に基づいて,与えられた目標のネジ穴にボルトを挿入する。ボルトがネジ穴に入ったかどうかは,同じ触覚センサーから得られる力計測の結果に基づいて判断する。把持したボルトのハンド内位置・姿勢にばらつきがあっても,触覚のみにより,目標のネジ穴に挿入,仮締めを行うことができた。このような触覚画像センサーは,出力が画像として得られるため,深層学習を用いた画像認識技術と相性がよい。これまでに,対象物表面の曲率の小さな違いを識別したり,凹凸テクスチャの微妙な違いを識別することができた。抽出した触覚情報を,ロボットやハンドの動きに結びつけ,これまでロボットの適用が難しかった作業を実現していくことが今後の課題である。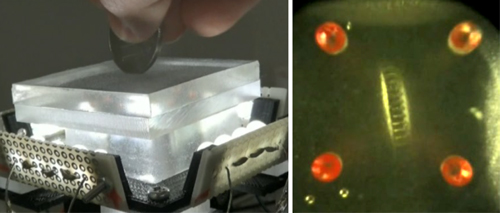
図1 カメラを用いた触覚画像センサー
[研究テーマ2]ローラ状反射膜型光学式触覚センサー
表面検査や,異物混入検査のような検査作業においても,人が触覚に頼って作業する場合がある。このような検査用途において,広い検査対象面から効率よく触覚情報を取得するために,ローラ型の触覚画像センサーを提案した。透明なアクリルの円筒の外側表面に反射膜コーティング(反射率の高い塗料を塗布)した透明エラストマで覆い,接触センサー面として用いることができるようにした。この円筒を検査対象面上で転がし,円筒内部に固定されたカメラで,センサー面と対象との接触部を撮影する。このような構造により,スキャナーのように検査面全体を走査し,効率よく触覚情報を取得できる。ここで用いている反射膜方式のセンサー面は,接触した対象物表面の凹凸構造を感度よく可視化できる。図2では,紙幣の表面をこのセンサーでスキャンした例を示している。インクの凹凸が明瞭に可視化できていることが分かる。試作したセンサーで,5 µmの高さの凸部が可視化できることを確認している。工業製品や食品の検査への応用を目指して,研究を行っている。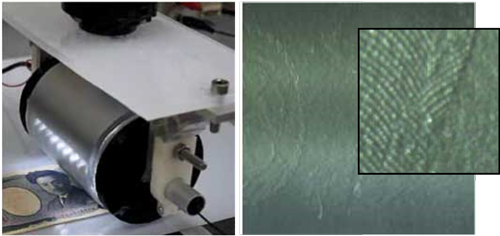
図2 ローラ状反射膜型光学式触覚センサー
[研究テーマ3]ドローンによる空中マニピュレーション
現在,ドローンの主な応用は,「空撮」と「輸送」である。一方,飛行することで高所に容易に移動できることや,3次元空間中で位置決めが可能などのマルチロータ機の特長を利用して,特に高所における「作業」を実現することは,次世代応用として興味深い。飛行中の機体により物体操作や作業を行う技術は“空中マニピュレーション(aerial manipualation)”と呼ばれ,世界中で研究が行われている。本研究室でも,マルチロータ機をベースにした空中マニピュレーションのための飛行ロボットの開発を行ってきた。作業を実行するためには,ドローンは飛行しながら作業対象物に物理的に接触することになる。対象物に力を加えれば,反力が生じるが,空中に浮いた状態のドローンは,地上で作業するロボットとは力学的な条件が大きく異なる。また,作業点に対する位置決めについても,例えば数cmの精度を出すことが,飛行ロボットでは容易ではない。さらに,ドローンに搭載可能な重量はあまり大きくないため,利用できる装置にも制限があり,これも大きな制約となる。このような制約の中で様々な空中マニピュレーションを実現するために,高性能,小型・軽量化,低消費電力をキーワードにして,ドローンに搭載するロボットハンドやマニピュレータ,センシングシステム,それらの要素のシステムインテグレーションに取り組んでいる。
図3 3本のロボットアームをもつ作業用飛行ロボット
下ノ村研究室より
人とロボットが得意分野を生かして作業内容を分担し助け合うことで,ディーセントワーク(働きがいのある人間らしい仕事)をすべての人々にもたらすSDGsの実現にもつながると考えています。ロボットの視覚や触覚となるセンシング機能は,ロボットが周囲の様子を知り適切に動くために重要な技術であるため,これらを高度化することで,これまでロボットにとって難しかった作業の実現に挑戦しています。新しいセンサーや新しい作業機能をシーズとして提案するとともに,機械導入の難しい手作業や人材不足に関する現場のニーズをヒアリングしながら,作業の自動化の実現を目指しています。 立命館大学 センサ知能統合研究室
住所:〒525-8577 滋賀県草津市野路東1-1-1立命館大学 理工学部 ロボティクス学科
TEL: 077-561-4826 FAX: 077-561-2665
E-mail:skazu@fc.ritsumei.ac.jp
URL:http://www.ritsumei.ac.jp/se/~skazu/

![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.29 [大阪大学 山本・生田研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/09/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.28 [東海大学 藤川研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/07/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.27 [東京大学 生産技術研究所 志村研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/05/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.26 [慶應義塾大学 神成淳司研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/03/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.25 [東京大学 竹内 渉研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/01/laboratory1.jpg&w=40&h=40&zc=1&q=100)








![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)