研究室探訪vol. 13 [中央大学 梅田研究室(知的計測システム研究室)]梅田 和昇 教授,池 勇勳 助教
あの研究室はどんな研究をしているのだろう? そんな疑問に答える“研究室探訪”。
今回は,中央大学 知的計測システム研究室にお伺いしました。


本テーマでは, 2眼のステレオカメラの距離計測結果と時系列画像を用いた距離計測結果とを擬似バイラテラルフィルターと呼ぶ手法を用いて融合することでセンサーの高精度化を目指す研究や,既知距離にあるターゲットから得られた視差誤差を用いて視差補正を行い,不十分なキャリブレーションによる距離計測誤差を低減する研究に取り組んでいる。
今後は,個々のカメラでの物体検出・トラッキング手法の改善によって,よりロバストな人物追跡を実現すること,ならびに本枠組を人物追跡以外の問題に適用することをめざす。
今回は,中央大学 知的計測システム研究室にお伺いしました。
精密さの追求を通じて,“知的な計測”技術の実現をめざす
梅田研究室では,ロボットなどの知能機械のための“知的な計測”技術の実現を研究テーマとしている。画像処理技術をコアとし,一度に広範囲を計測できる魚眼カメラによる距離画像計測手法の構築,ジェスチャーを認識して家電製品を操作できるインテリジェントルームの構築,差分ステレオと呼ぶ手法を用いて複数の人物の3次元運動を計測するシステムの構築など多岐に渡る研究を行っている。梅田 和昇 教授
1989年 東京大学工学部精密機械工学科卒業。1994年 同大学大学院工学系研究科精密機械工学専攻博士課程修了,博士(工学)。2006年 中央大学理工学部教授。知覚情報処理,知能機械学・機械システム,計測工学に従事。
1989年 東京大学工学部精密機械工学科卒業。1994年 同大学大学院工学系研究科精密機械工学専攻博士課程修了,博士(工学)。2006年 中央大学理工学部教授。知覚情報処理,知能機械学・機械システム,計測工学に従事。
池 勇勳 助教
2012年 高麗大学(韓国)メカトロニクス協同課程メカトロニクス専攻修士課程修了。2016年 東京大学工学系研究科精密工学専攻博士課程修了,博士(工学)。2018年 中央大学理工学部助教。移動ロボット,知覚情報処理に従事。
2012年 高麗大学(韓国)メカトロニクス協同課程メカトロニクス専攻修士課程修了。2016年 東京大学工学系研究科精密工学専攻博士課程修了,博士(工学)。2018年 中央大学理工学部助教。移動ロボット,知覚情報処理に従事。
[研究テーマ1] 魚眼ステレオカメラを用いた距離画像計測手法
近年,距離センサーを用いた自動車の運転支援システムの研究開発が盛んになっている。しかし,これらのセンサーには距離計測範囲の狭さや計測密度の低さというデメリットがあり,死角が存在していることが問題になっている。そこで,魚眼ステレオカメラを用いて広範囲の距離計測を行う研究を行っている。魚眼カメラの画角は180度以上であり,そのサイズも小さいことから車載に適していると考えられる。本テーマでは, 2眼のステレオカメラの距離計測結果と時系列画像を用いた距離計測結果とを擬似バイラテラルフィルターと呼ぶ手法を用いて融合することでセンサーの高精度化を目指す研究や,既知距離にあるターゲットから得られた視差誤差を用いて視差補正を行い,不十分なキャリブレーションによる距離計測誤差を低減する研究に取り組んでいる。
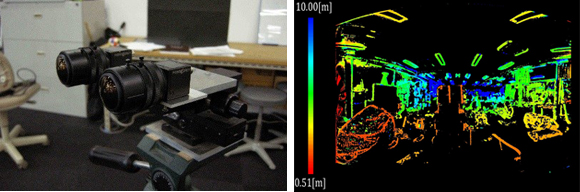
図1 魚眼ステレオカメラと取得した距離画像
[研究テーマ2] マルチスリットレーザーを用いた距離画像センサーによる3次元地図生成
近年,自律移動ロボットによる災害現場における救護活動や調査が期待されている。ロボットが効率的に活動するためには周囲の環境把握が必要であり,そこで用いられるものの1つとして距離画像センサーがある。われわれは,マルチスリットレーザーとカメラを用いた距離画像センサーを構築している。さらに,そのセンサーから得られた距離画像とカラー画像によりセンサ―の運動を推定し,距離画像を複数枚重ね合わせることで,3次元地図を生成することが可能である。今後,距離画像センサーの性能向上ならびに,より高精度な3次元地図の構築を検討している。
[研究テーマ3] 2台のカメラのトラッキングの融合による移動ロボットの3次元人物追跡
特定の人物の追跡は多岐にわたる自律移動ロボットに求められる機能の1つであり,この機能により,ロボットが荷物や資材を運搬しながら特定の人物を追跡することが可能になる。この機能を実現するためにステレオカメラが多く使われる。一般的なステレオカメラでは,シーン全体の距離画像を極力正確に取得し,その後に得られた距離画像に対してタスクに応じた処理を行っている。これに対して,本研究では,個々のカメラでタスクに応じた処理を行い,その後に処理結果を融合することで,必要な対象のみに関しての3次元情報を取得するという枠組を提案している。具体的なタスクとして物体の3次元トラッキングを取り上げ,個々のカメラで物体検出・トラッキングを行い,その結果を統合することで3次元のトラッキング情報を取得する手法を構築している。今後は,個々のカメラでの物体検出・トラッキング手法の改善によって,よりロバストな人物追跡を実現すること,ならびに本枠組を人物追跡以外の問題に適用することをめざす。

図3 2台のカメラのトラッキング
知的計測システム研究室より
本研究室では,ここに示した以外にも多岐に渡る研究を行っており,最近では,時流に乗った(?)深層学習の研究も,骨格により人物識別や工場内での動作認識を対象に行っている。一方で,伝統的な(?)3次元計測や画像処理・計測の研究も大切にしている。また,基礎研究を大切にしつつ,企業などとの共同による実用的な研究も積極的に行っている。一言で言えば,多くの優秀な学生を活用したバランスのとれた研究室運営を心がけているということになろうか。関心をお持ちいただけたら,是非お声がけいただきたい。 中央大学 理工学部 精密機械工学科
梅田研究室(知的計測システム研究室)
住所:〒112-8551 東京都文京区春日1-13-27
中央大学 後楽園キャンパス 2号館7階2720室
TEL: 03-3817-1826 FAX: 03-3817-1820
E-mail:umeda@mech.chuo-u.ac.jp
URL:http://www.mech.chuo-u.ac.jp/umedalab/

![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.29 [大阪大学 山本・生田研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/09/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.28 [東海大学 藤川研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/07/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.27 [東京大学 生産技術研究所 志村研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/05/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.26 [慶應義塾大学 神成淳司研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/03/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.25 [東京大学 竹内 渉研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/01/laboratory1.jpg&w=40&h=40&zc=1&q=100)








![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)