研究室探訪vol.6 [中部大学 工学部 機械知覚&ロボティクス研究グループ]藤吉 弘亘 教授,山下 隆義 教授
あの研究室はどんな研究をしているのだろう? そんな疑問に答える“研究室探訪”。
今回は,中部大学 工学部 機械知覚&ロボティクス研究グループを訪問しました。
ロボットとは,「外界のデータを取り込み(感覚),その意味と理解し(認識),何をするべきかを判断し(決定),結果として人に役に立つように外界に働きかける(行動)システム」と広くとらえて,本研究グループでは,感覚→認識→決定のプロセスとなる視覚機能をロボットに実現することを目標として研究に取り組んでいる。
研究分野は,機械学習を用いた物体検出,人物画像解析等を中心とした画像認識全般である。基礎研究と応用研究を行ったり来たりしながら,役に立つ研究を目指している。
現在,具体的には人型ロボットや高度交通システム(ITS)などの研究開発が進んでいるが,これらに欠かせないのが,われわれの研究テーマである動画画像理解技術である。これらは動画から必要な情報を読み取るもので,人間の「視覚」にあたる。一言で言えば「人を観る技術」。例えば,動画の中から人だけを検出したり,歩いている人の流れ(動線)を追跡したり,三次元空間内の人物や車の行動を予測できる技術が挙げられ,多分野での活用が期待されている。


当研究グループでは,企業等との会議などに大学院生はもちろんのこと学部4年生も出席してもらうなど,学生が研究に積極的に取り組めるようにしている。研究を通して学生たちは「困難があっても最後まであきらめない」という姿勢を身に付け,現在,多数の企業で活躍している。
今回は,中部大学 工学部 機械知覚&ロボティクス研究グループを訪問しました。
機械学習を用いた高精度物体認識に関する研究 −ロボットの視覚機能の実現−
中部大学工学部のロボット理工学科・藤吉弘亘研究室と情報工学科・山下隆義研究室からなるMachine Perception and Robotics Group(MPRG)は,“機械知覚とロボティクス”に関する研究グループである。所属の制約にとらわれず,自由に最適なメンバーで研究に取り組むことができるグループとして,2014年4月から活動を始めた。ロボットとは,「外界のデータを取り込み(感覚),その意味と理解し(認識),何をするべきかを判断し(決定),結果として人に役に立つように外界に働きかける(行動)システム」と広くとらえて,本研究グループでは,感覚→認識→決定のプロセスとなる視覚機能をロボットに実現することを目標として研究に取り組んでいる。
研究分野は,機械学習を用いた物体検出,人物画像解析等を中心とした画像認識全般である。基礎研究と応用研究を行ったり来たりしながら,役に立つ研究を目指している。
現在,具体的には人型ロボットや高度交通システム(ITS)などの研究開発が進んでいるが,これらに欠かせないのが,われわれの研究テーマである動画画像理解技術である。これらは動画から必要な情報を読み取るもので,人間の「視覚」にあたる。一言で言えば「人を観る技術」。例えば,動画の中から人だけを検出したり,歩いている人の流れ(動線)を追跡したり,三次元空間内の人物や車の行動を予測できる技術が挙げられ,多分野での活用が期待されている。
藤吉 弘亘 教授
1997年 中部大学大学院博士後期課程修了,2005~06年 米カーネギーメロン大学ロボット工学研究所客員研究員,2010年 中部大学教授, 2014年 名古屋大学客員教授。画像処理工学,コンピュータビジョン研究。
1997年 中部大学大学院博士後期課程修了,2005~06年 米カーネギーメロン大学ロボット工学研究所客員研究員,2010年 中部大学教授, 2014年 名古屋大学客員教授。画像処理工学,コンピュータビジョン研究。
山下 隆義 教授
2002年 奈良先端科学技術大学院大学博士前期課程修了,2002年 オムロン株式会社入社, 2011年 中部大学大学院博士後期課程修了(社会人ドクター),2017年 中部大学准教授。画像処理・パターン認識研究。
2002年 奈良先端科学技術大学院大学博士前期課程修了,2002年 オムロン株式会社入社, 2011年 中部大学大学院博士後期課程修了(社会人ドクター),2017年 中部大学准教授。画像処理・パターン認識研究。
[研究テーマ1] 研究室の知的資源と企業との共同研究開発ニーズの成果が着々と
オムロン,中京大との合同チーム「ROC2」で国際ロボット競技会サービス部門2位入賞
合同チームは「World Robot Summit 2018(10月17日~21日)」の国際ロボット競技会「World Robot Challenge」に出場し,サービス部門「フューチャーコンビニエンスストアチャレンジ,陳列・廃棄タスク」において国内外から参加した23チームのうち2位に入賞し,昨年度に続き2年連続の入賞となった。合わせて,日本ロボット学会特別賞も受賞した。人手不足と高齢化社会における社会的課題の解決に向け,ロボット技術が従業員の負担を軽減し,顧客に新たなサービスを提供する「未来のコンビニエンスストアの実現」を競合した。
三菱電機,中京大との合同チームで「アマゾンロボティックス・チャレンジ(ARC)」3位入賞
多数の商品群が置かれた物流倉庫を想定し,各チームが開発したロボットが指定された商品をいかに速く正確に取り出し収納ができるかを競うARCは2017年7月27日~30日に開催された。物体認識,姿勢制御,把持計画などを組み合わせ,一定時間内に取り出しや収納に成功した商品数によって採点される。日米独など世界十ヵ国・地域の16チームが事前審査を通過,合同チーム「MC^2(エム・シー・スクエアード)」は第1回, 第2回に引き続き参加し,大会は会ごとに課題が難しくなっているというが,MC^2は,Stow Task部門第3位という輝かしい成績を収めた。
[研究テーマ2] 経路予測
経路予測とは,歩行者や自動車などの移動物体が未来にどのような道筋を移動するかを予測する問題である。現在,経路予測は自動運転による交通事故の防止やロボットの自律制御などに応用が期待されている。われわれの研究では,予測対象の過去の座標に加えてさまざまな情報をネットワークの入力として用いることで,予測対象の移動経路を高精度に予測する研究に取り組んでいる。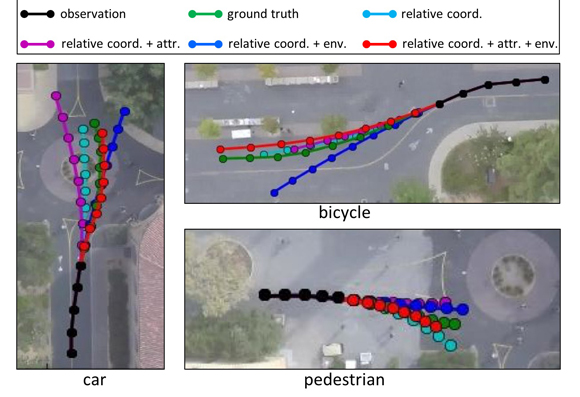
[研究テーマ3] Convolutional Neural Networkによるセマンティックセグメンテーション
セマンティックセグメンテーションは,画像中のシーンを理解する上で重要な認識タスクである。一般的な物体認識は,画像中の物体の位置とスケールを推定する技術ですが,セマンティックセグメンテーションは画像の各ピクセルが何の物体なのかを認識する技術である。Deep Convolutional Neural Network(DCNN)を用いたセマンティックセグメンテーションの研究は活発に研究されており, 代表的な手法としてSegNet やFully Convolutional Network(FCN)が提案されている。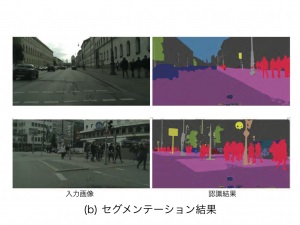
機械知覚&ロボティクス研究グループより
現在研究している技術は,ロボット,ITS以外にも,バイオメトリクスや,ゲーム,マーケティングなどさまざまな分野に活用できることもあって,複数の企業との共同研究が進んでいる。たとえば,車載カメラで撮影した動画からリアルタイムに標識を検出してドライバーに知らせるシステムや,講師の動きを追尾するなど,学生の視線で講義の様子が家庭用ハイビジョンカメラで撮影できるシステムなどを共同開発し,すでに製品化されたものもある。また,NEDO次世代人工知能・ロボット中核技術開発に参画し,ロボットの知能化に関する研究に取り組んでいる。当研究グループでは,企業等との会議などに大学院生はもちろんのこと学部4年生も出席してもらうなど,学生が研究に積極的に取り組めるようにしている。研究を通して学生たちは「困難があっても最後まであきらめない」という姿勢を身に付け,現在,多数の企業で活躍している。
中部大学 工学部 機械知覚&ロボティクス研究グループ
中部大学 工学部 ロボット理工学科/情報工学科
住所:〒487-0027 愛知県春日井市松本町1200
TEL:0568-51-9374(ロボット理工学科共通室直通)
0568-51-4641(情報工学科共通室直通)
E-mail:fujiyoshi@isc.chubu.ac.jp(藤吉弘亘)
takayoshi@isc.chubu.ac.jp(山下隆義)
URL:http://mprg.jp

![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.29 [大阪大学 山本・生田研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/09/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.28 [東海大学 藤川研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/07/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.27 [東京大学 生産技術研究所 志村研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/05/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.26 [慶應義塾大学 神成淳司研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/03/laboratory1.jpg&w=40&h=40&zc=1&q=100)
![研究室探訪vol.25 [東京大学 竹内 渉研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/01/laboratory1.jpg&w=40&h=40&zc=1&q=100)








![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)