赤ちゃんロボットと集団コミュニケーションロボットを開発 ― 認知発達研究の普及型ヒト型ロボット・プラットホームを実現 ―大阪大学 浅田稔
- 説明文
- 写真
2005年の9月から開始した,JST ERATO浅田共創知能システムプロジェクトでは,ロボットを通じて「人間の認知発達過程の新たな理解」を目指して研究を進めている。「共創知能」の意味は,科学と技術の共創という考えに加え,「システムが身体をもって環境とともに知能を共創する」という意味を持ち,現在4つの側面からアプローチしている。
動的な運動を実現可能な身体の設計や構築を通じて,運動発達から認知発達を目指す「身体的共創知能」グループ。胎児の脳と身体の発達シミュレーションから誕生後の養育者とのさまざまな相互作用のモデル化を目指す「対人的共創知能」グループ。さらに,多数のヒトやロボット間におけるコミュニケーションの発達過程を対象としている「社会的共創知能」グループ。そして,これらの過程を認知神経科学の立場から,モデル化を支援し,相互フィードバックを通じて新たな理解をめざす「共創知能機構」グループの4つである。
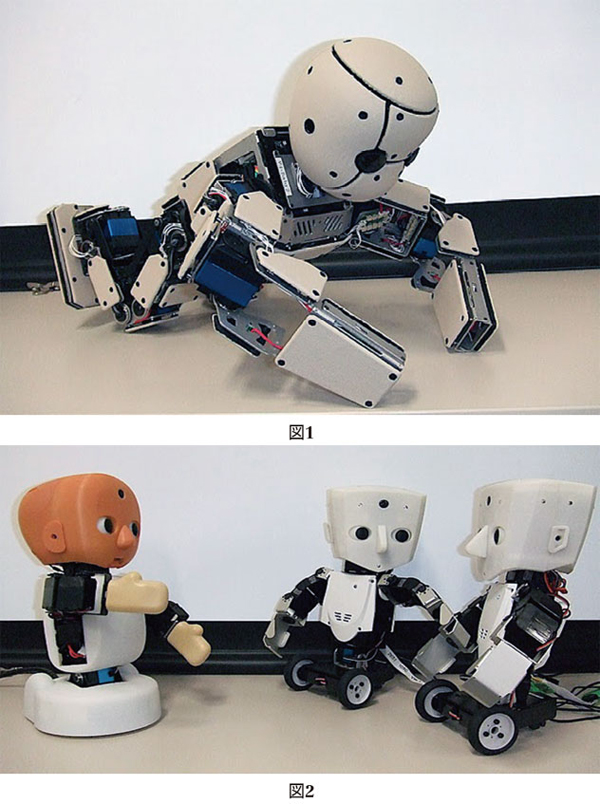
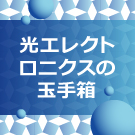
今回,石黒 浩 大阪大学教授が率いる社会的共創知能グループから,人間とロボットの認知発達研究のための普及型ヒト型ロボット・プラットホームとして,赤ちゃんロボット「M3-neony(エムスリー・ネオニー)」(図1)と,集団コミュニケーションロボット「M3-synchy(エムスリー・シンキー)」(図2)を公開した。これらは,近年活発になっている,発達心理学,認知科学,脳科学などの人間科学とロボット工学との融合研究において必要とされるプラットホームと位置づけられる。
M3-neonyは,ロボカップヒューマノイドリーグで連続優勝を果たした「チーム大阪」のロボットをベースにしているため,歩行,蹴球,転倒からの立ち上がりや,転倒自体に対する安全性など,高い保守性と運動能力を備えている。加えて,視覚・触覚・聴覚などの多様な感覚を有し,赤ちゃんの発達過程でみられる身体バブリングによる運動学習や,身体接触を伴う介助による学習などを研究することが可能である。一方,M3-synchyは,集団コミュニケーションロボットと呼ばれていることからも分かるように,複数のロボットと人間の間の言語的・非言語的コミュニケーションを研究することが可能で,中でも視線行動によるコミュニケーション実現に適した機能を備えている。これらのロボットが,さまざまな認知発達研究に使われるようになることにより,人間やロボットの認知発達研究が活性化し,人間の認知発達メカニズムのより深い理解や学習・発達機能の向上によって,人間社会で適応的に振る舞うことができるロボットの実現につながることが期待される。
動的な運動を実現可能な身体の設計や構築を通じて,運動発達から認知発達を目指す「身体的共創知能」グループ。胎児の脳と身体の発達シミュレーションから誕生後の養育者とのさまざまな相互作用のモデル化を目指す「対人的共創知能」グループ。さらに,多数のヒトやロボット間におけるコミュニケーションの発達過程を対象としている「社会的共創知能」グループ。そして,これらの過程を認知神経科学の立場から,モデル化を支援し,相互フィードバックを通じて新たな理解をめざす「共創知能機構」グループの4つである。
今回,石黒 浩 大阪大学教授が率いる社会的共創知能グループから,人間とロボットの認知発達研究のための普及型ヒト型ロボット・プラットホームとして,赤ちゃんロボット「M3-neony(エムスリー・ネオニー)」(図1)と,集団コミュニケーションロボット「M3-synchy(エムスリー・シンキー)」(図2)を公開した。これらは,近年活発になっている,発達心理学,認知科学,脳科学などの人間科学とロボット工学との融合研究において必要とされるプラットホームと位置づけられる。
M3-neonyは,ロボカップヒューマノイドリーグで連続優勝を果たした「チーム大阪」のロボットをベースにしているため,歩行,蹴球,転倒からの立ち上がりや,転倒自体に対する安全性など,高い保守性と運動能力を備えている。加えて,視覚・触覚・聴覚などの多様な感覚を有し,赤ちゃんの発達過程でみられる身体バブリングによる運動学習や,身体接触を伴う介助による学習などを研究することが可能である。一方,M3-synchyは,集団コミュニケーションロボットと呼ばれていることからも分かるように,複数のロボットと人間の間の言語的・非言語的コミュニケーションを研究することが可能で,中でも視線行動によるコミュニケーション実現に適した機能を備えている。これらのロボットが,さまざまな認知発達研究に使われるようになることにより,人間やロボットの認知発達研究が活性化し,人間の認知発達メカニズムのより深い理解や学習・発達機能の向上によって,人間社会で適応的に振る舞うことができるロボットの実現につながることが期待される。















![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)