炎の中のとがった物体でもつかめる数珠上の柔軟堅牢ロボットハンド東北大学 多田隈 建二郎
- 説明文
- 写真
災害からの復旧を支援する目的として,作業者の安全を確保しつつ遠隔操作で作業できるロボットが求められている。中でも,ロボットハンドはバルブの開閉や瓦礫の把持・運搬などの直接環境と接触する作業で活躍し,その機能や性能によって作業が可能か否かを決める重要な要素となる。
従来の袋型のロボットハンドは,とがった物体をつかむ際に袋が破れる問題があった。そのため,災害時の現場で,破損バルブの開閉や瓦礫内のガラスの破片,鉄筋の露出したコンクリートなどをつかむことができず,物体によってロボットハンドを別の物に付け替える必要があった。また,プラント爆発後などの火災現場などでは灼熱の瓦礫をつかむことは極めて困難であった。
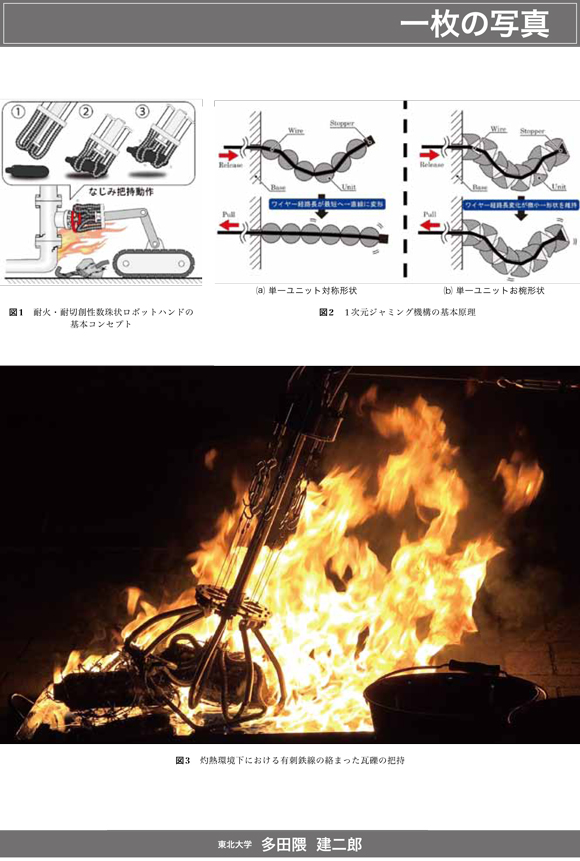
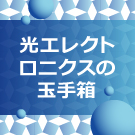
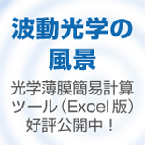
本研究グループでは,形や大きさが異なる物でもつかむことができる数珠状の構造を有する線状機構(1次元ジャミング機構:硬さの変わる紐状構造体)を複数有するロボットハンドを開発してきた。内部のワイヤーを引くことで,数珠玉どうしが接触力を高めて指全体が硬化する(図1,図2)。そのため,従来の袋型と内部粉体の柔剛切替に対して,「『破ける』という現象自体がなく」,布やゴム素材を使用しない金属性部品で構成できるため,灼熱の環境下で,高温かつ複雑な形状や脆弱な物体の損傷を抑えた状態でつかむことが可能になる。以上のように,従来の袋型構造に対して,数珠状の金属指を複数用いたロボットハンド構造のアイディアを考案し,柔軟性を保ちながら優れた耐火性・耐切創性を実現した(図3)。このロボットハンドを用いれば,灼熱の環境下で,高温の物体や破損したバルブ,不定形な割れたガラス類や建築用で飛び出た釘類・鉄条網などの,従来不可能であった「高温」・「とがった」・「不定形」・「脆弱軟弱」な物体をつかむことが可能となる。この性能は,プラント爆発後の火災現場だけではなく,ゴム素材を用いることが困難な原子力発電所内での作業,工場の生産現場でも活躍が期待されている。また,部品に応じてロボットハンドを交換する必要がなく,そのままでさまざまな部品に対応できるため,多品種少量生産で必要な,多くの種類の複雑形状の部品をつかむことや組み立て,搬送作業への適用も期待されている。また,このロボットハンドは軽量なため災害対応用ヘビ型ロボットや脚型ロボットをはじめとする各種プラットフォームに搭載可能である。
さらに,放水銃をロボットハンドの中央に設けることで,瓦礫や扉・蓋をこじ開け,先の火元へ直接消火剤をかけて迅速かつ確実に消火を促す機器への展開も考えられる。
従来の袋型のロボットハンドは,とがった物体をつかむ際に袋が破れる問題があった。そのため,災害時の現場で,破損バルブの開閉や瓦礫内のガラスの破片,鉄筋の露出したコンクリートなどをつかむことができず,物体によってロボットハンドを別の物に付け替える必要があった。また,プラント爆発後などの火災現場などでは灼熱の瓦礫をつかむことは極めて困難であった。
本研究グループでは,形や大きさが異なる物でもつかむことができる数珠状の構造を有する線状機構(1次元ジャミング機構:硬さの変わる紐状構造体)を複数有するロボットハンドを開発してきた。内部のワイヤーを引くことで,数珠玉どうしが接触力を高めて指全体が硬化する(図1,図2)。そのため,従来の袋型と内部粉体の柔剛切替に対して,「『破ける』という現象自体がなく」,布やゴム素材を使用しない金属性部品で構成できるため,灼熱の環境下で,高温かつ複雑な形状や脆弱な物体の損傷を抑えた状態でつかむことが可能になる。以上のように,従来の袋型構造に対して,数珠状の金属指を複数用いたロボットハンド構造のアイディアを考案し,柔軟性を保ちながら優れた耐火性・耐切創性を実現した(図3)。このロボットハンドを用いれば,灼熱の環境下で,高温の物体や破損したバルブ,不定形な割れたガラス類や建築用で飛び出た釘類・鉄条網などの,従来不可能であった「高温」・「とがった」・「不定形」・「脆弱軟弱」な物体をつかむことが可能となる。この性能は,プラント爆発後の火災現場だけではなく,ゴム素材を用いることが困難な原子力発電所内での作業,工場の生産現場でも活躍が期待されている。また,部品に応じてロボットハンドを交換する必要がなく,そのままでさまざまな部品に対応できるため,多品種少量生産で必要な,多くの種類の複雑形状の部品をつかむことや組み立て,搬送作業への適用も期待されている。また,このロボットハンドは軽量なため災害対応用ヘビ型ロボットや脚型ロボットをはじめとする各種プラットフォームに搭載可能である。
さらに,放水銃をロボットハンドの中央に設けることで,瓦礫や扉・蓋をこじ開け,先の火元へ直接消火剤をかけて迅速かつ確実に消火を促す機器への展開も考えられる。















![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)