画像センシングの最前線
先進運転支援システム( ADAS ),自動運転のための画像センシング技術名古屋大学 二宮 芳樹
4.車載画像処理ハードウェア
現在,車載環境で高度な認識アルゴリズムや複数のアルゴリズムの実時間処理を実現するには,組み込み用のCPUでは困難であり,MobileyeのEyeQや東芝のViscontiなどのSoC ( System-on-a-chip) とFPGA (field-programmable gate array ) などの専用ICが一般的用いられている。NVIDIAは車載用のGPU( Graphic Processing Unit)の導入と将来に向けてのロードマップを示している。現状のMobileye EyeQ3とNVIDIA Tegra X1の比較を表に示す*2。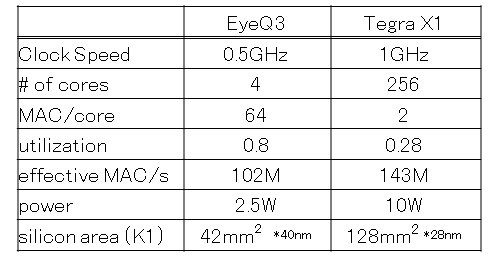
表2.Mobieye EyeQ3とNvidia Tegra X1の比較
参考文献
- Amnon Shashua, “The Future of Computer Vision and Automated Driving by Prof. Amnon Shashua”,Youtube, https://youtu.be/kp3ik5f3-2c
<次ページへ続く>

名古屋大学 二宮 芳樹
1983年 名古屋大学 工学研究科 電子工学専攻 終了車の知能化、自動運転の研究に従事
1983年 (株)豊田中央研究所 入社
2004年 (株)豊田中央研究所 走行支援センシング研究室 室長
2011年 (株)豊田中央研究所 情報エレクトロニクス研究部 部長
2014年 名古屋大学 未来社会創造機構 モビリティ部門長 特任教授(工学博士)
















