画像センシングの最前線
先進運転支援システム( ADAS ),自動運転のための画像センシング技術名古屋大学 二宮 芳樹
2.ADAS,自動運転のための外界センサ
ADAS,自動運転のための外界センサは,大きく受動型のカメラと,能動型のレーザスキャナー,ToF ( Time of Flight) センサ,レーダに大別できる。ACCや自動ブレーキなどの運転支援システムでは,車両検出に適し,耐候性に優れたミリ波レーダが用いられてきた。自動運転になると,周囲の道路構造や歩行者などの検出が基本機能になるため,レーザスキャナーやステレオカメラのような空間分解能が高い距離情報が得られるものがメインセンサとして用いられるようになった。また,自動運転では信号や路面マークの検出も必須となるため,カラーカメラも必須となる(表1)。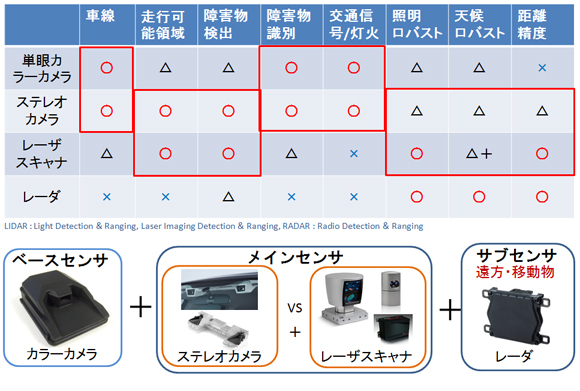
表1.自動運転に必要な外界センサ
自動運転車のシンボル的なセンサであるVelodyne HDL-64Eは,64のスキャンライン,360度の視野角を持つレーザスキャナーである。IbeoのLUXシリーズも車体にビルトイン可能で,4または8ラインのレーザスキャナーとして自動運転実験車で幅広く利用されている。レーザスキャナーはステレオカメラに対して,照明条件に対するロバスト性が優れ,遠方まで高い距離精度が得られるが,カメラに比べると解像度は低く,大型でコストも高いという課題がある。撮像素子を利用して,アクティブ方式で距離を算出できる光センサとしてToFセンサがある。Kinect2などの通常のカメラと一体化したRGB-Dセンサもある。これらは能動型の光センサで低コスト,小型化へのアプローチの一つであるが,現状では屋外での距離レンジが不足する。ミリ波レーダは,遠方や動いている車両の検出に優れており,自動運転ではカメラやライダーを補完するセンサとして用いられている。
<次ページへ続く>

名古屋大学 二宮 芳樹
1983年 名古屋大学 工学研究科 電子工学専攻 終了車の知能化、自動運転の研究に従事
1983年 (株)豊田中央研究所 入社
2004年 (株)豊田中央研究所 走行支援センシング研究室 室長
2011年 (株)豊田中央研究所 情報エレクトロニクス研究部 部長
2014年 名古屋大学 未来社会創造機構 モビリティ部門長 特任教授(工学博士)
















