画像センシングの最前線
ロボットビジョン藤吉弘亘
3. クラウド型データベース&認識エンジン
APCで対象とした商品数は25点であるが,2013年2月現在でAmazonが扱う商品数は約5,000万点ある。APCはあくまでもチャレンジであり,物流分野での実用化には取り扱う商品数に対応できるかという課題がある。特に,学習ベースの認識アプローチの場合,約5,000万点のあらゆる視点からの学習用画像をどのように収集すればよいのか,また約5,000万点全てを学習する必要があるのか等の大きな課題に直面する。このような問題を解決する一アプローチとして,我々はクラウド型日用品データベース&認識エンジンの実現に取り組んでいる(NEDOの委託事業「次世代ロボット中核技術開発(次世代人工知能フレームワーク研究・先進中核モジュール研究開発)」。以下では,その取り組みとして,クラウド型日用品データベースとクラウド型ロボットビジョンについて紹介する。クラウド型日用品データベース
ロボットが対象物をピッキングするには,ロボットから対象物体までの三次元情報を持つ距離画像やポイントクラウドデータが必要となる。また,対象とする日用品の点数は多く,日々新しい商品が追加されるため,ロボット内部でデータベースを持つことは不可能である。そこで,日用品のデータベースをクラウド上に実現する。このデータベースは,商品の多視点画像ではなく,商品の三次元CADモデルと商品のパーツ構造,把持位置,テクスチャ等の属性情報を持つという特長がある。認識に必要となる三次元情報として,ロボットの視点位置と三次元CADモデルをもとにレンダリングで生成した距離画像とポイントクラウドデータを提供する。これにより,視点が異なる学習データの収集が容易となる。クラウド型日用品データベースは,下図に示すように,データベースそのものの利用と,データベースと連動した認識エンジンの利用が可能となることを目指している。また,ロボット自体から直接ROS(Robot Operating System)( http://www.ros.org)を通じてやりとりが可能となるようなフレームワークの実現を目標としている。ロボットから把持対象物の名前,画像,視点情報,ハンド情報をサーバに送信し,認識結果と把持位置等の情報をロボットに返す。ロボットは受信した情報をもとに把持動作を計画し,ピッキングを実行する。把持の失敗・成功をデータベースに再送信することで,把持成功事例と失敗事例をデータベースに追加していくことで,より適切な把持のための情報を提供することが可能となる。このようなロボットのためのデータベースの普及には,日用品を販売している企業からの三次元CADモデルの提供が必須である。このような三次元CADモデルが提供されている商品は,物流における自動化に大きく貢献することから,通販におけるコストを下げることが可能となり,提供する側にもメリットが生じることになる。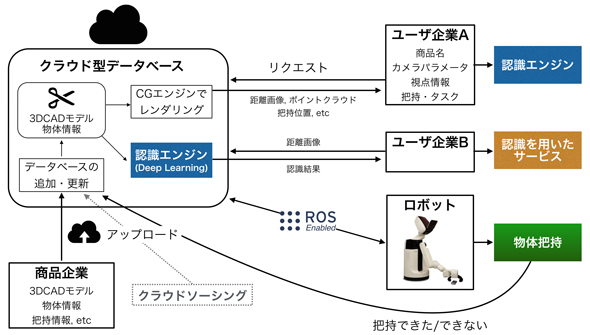
クラウド型日用品データベースと認識エンジン
クラウド型認識エンジン
2013年にKuffner等が提案したクラウドロボティクスは,ロボットとクラウド上の認識エンジンや情報処理技術を連携して大規模な計算やデータベースを要求するような情報処理をクラウドで担うという考え方である。我々は生活支援ロボットを対象に,特に処理時間を要する画像認識手法であるDeep Convolutional Neural Network(DCNN)を用いた顔器官点検出,顔属性推定,顔照合をクラウドで実現した。顔照合では,ロボットが取得した画像から検出した顔画像と,予めロボットが持つ顔画像が同一人物であるかを照合する。ロボット側では,撮影した画像から顔画像を検出し,畳み込み及びプーリングを行う。そして,プーリング後の出力をクラウドサーバに送信する。顔画像照合及び属性認識の際に,顔画像をクラウドサーバに直接送信することも考えられるが,通信時及びサーバ送信後に画像が流出する恐れがある。本システムでは,畳み込み処理の後にプーリングした出力を送信するため,情報が暗号化されることになる。暗号化されたデータには個人を特定するような情報を含まないため,個人情報という観点において安心できるようなシステムとなっている。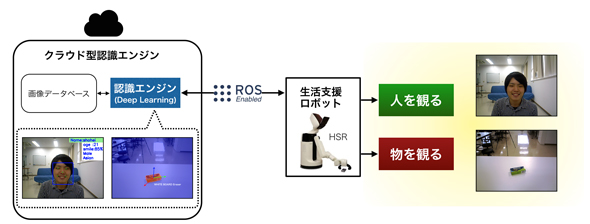
K. Sugiura and K. Zettsu, “Rospeex, A Cloud Robotics Platform for Human-Robot Spoken Dialogues”, IEEE/RSJ International Conference on Intelligent Robots and Systems,2015.
まとめ
ここでは,ロボットビジョンのタスクと一アプローチとしてAmazon Picking Challengeでの取り組みとロボットビジョンの今後の展望について紹介した。クラウドロボティクスにより,IoT (Internet of Things) の一つとしてロボットが利用され,ロボットは製造現場から物流,そして生活空間へと実利用の場が広がっていくであろう。これに伴いロボット分野におけるビジョン技術の利用は今後ますます本格化していくものと期待されている。
謝辞
本記事の執筆では,中京大学の橋本 学先生と三菱電機(株)先端総合技術研究所の堂前様に多大のご協力をいただきました。
ここに感謝の意を表します。

藤吉弘亘
中部大学 工学部 ロボット理工学科 機械知覚&ロボティクス研究グループ















