セミナーレポート
車載カメラで危険を検知し,安全運転を可能にする(株)豊田中央研究所 町田 貴史
本記事は、画像センシング展2012にて開催された特別招待講演を記事化したものになります。
GPU利用でCPU単独の40倍の高速で,歩行者を検出
豊田中央研究所では,GPUによる処理を利用した,ITSにおける歩行者検出技術の開発に取り組んでいます。歩行者検出技術とは,ドライバーにとって危険な歩行者をその向きによって判定するもので,歩行者の行動を形状として捉える特徴量で判断します。近年,パターン認識の分野で広く使われているのがHOG(Histograms of Oriented Gradients)特徴で,小領域におけるエッジ勾配ごとの頻度(ヒストグラム)をならべ,一定領域における,おおまかな物体形状を記述します。それに対して,私たちが開発したのが特徴量間の関係に着目したFIND(Feature Interaction Descriptor)特徴で,対象の輪郭形状をより精緻に表現,HOG特徴より高い識別性能があります(図2)。
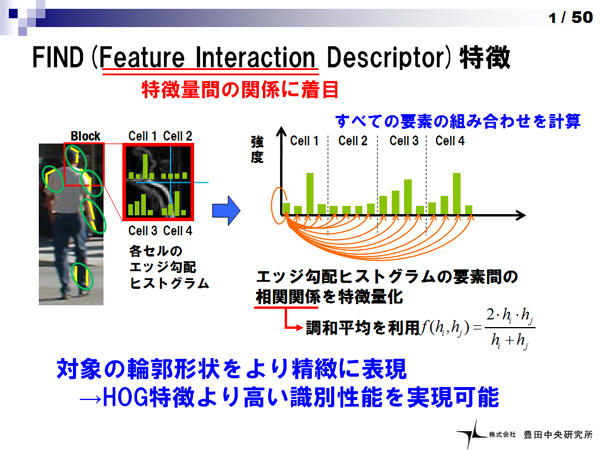
図2 特徴量間の関係に着目したFIND特徴で,対象の輪郭形状をより精緻に表現することができる
3段カスケード方式では,1段目(HOG)の特徴次元数が384,2段目(HOG)が1056,3段目(FIND)が42,768と,次元数が多くなります。その結果,VGAで1フレームあたり280億回の四則計算が必要になり,最新のCPUでも1秒ほどかかってしまい,実用になりません。そこで,GPUを利用することにし,1つ目の候補枠の並列化はCPU,2つ目の候補枠走査の並列化と3つ目の候補枠内の識別演算の並列化はGPUで行う,3階層の並列化で処理することにしました。これによって,合計約650万スレッドを生成した並列演算が可能になり,CPUにIntel Corei7 3.2GHz,GPUにnVidia Geforce 580 GTXを使い,1CPUでの単独処理と比べて,約40倍の高速化を実現しました。
現状のGPUでは消費電力が多く,車に搭載することはできませんが,nVidia社では車載用GPUの開発を進めており,2014年には2-3Wの消費電力で,Core2Quadを超えるチップがリリースされる予定です。その段階になれば,車載化が可能になると,GPUの進化に大きな期待を寄せています。

株式会社豊田中央研究所 町田 貴史
1998年大阪大学基礎工学部情報工学科卒業。2002年奈良先端科学技術大学院大学・情報科学研究科博士後期課程単位取得退学。同年大阪大学サイバーメディアセン ター助手。2006年(株)豊田中央研究所入社。博士(工学)。コンピュータービジョン,コンピューターグラフィックスの研究に従事。情報処理学会,IEEE各会員。












