研究というのはできないことに挑戦していくほうがいい東京電機大学 工学部 機械工学科 先端機械コース 教授 堀内 敏行
あまり小さくなくても役に立つ
聞き手:光リソグラフィと飛翔ロボットの今後についてお聞かせ下さい。堀内:産業を横断して眺めると,どんな分野でも,今使われているものを少し小さくすることでかなり性能が良くなる物がいろいろあるように思えます。リソグラフィの研究については,大パターンなりにそういう物を探していきたいですね。
今まで研究したものですと,学会発表を見た企業にマイクロコイル(図3)が採用されました。
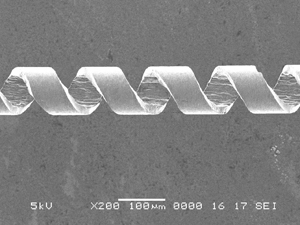
図3 円筒試料外面の螺線パターンをもとに作製したマイクロコイル
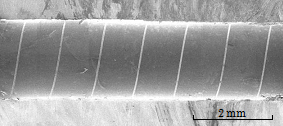
図4 内径2mmの銅管内面に形成した線幅25μmの螺線パターン
独自に研究中のものとしては,液晶ディスプレイに表示したパターンをウエハ上に転写するデスクトップ露光装置,屈折率分布型レンズアレイを投影レンズとする大面積投影露光装置,発光ダイオードマトリックスを光源とする2次元コードマーク露光装置,小径円柱面にレーザ走査描画ではなく走査投影露光によりパターン形成する装置,微細管内面にレーザ走査でパターンを形成する露光装置などがあります。
飛翔ロボットもいろいろと役に立つと考えています。小さいロボットを研究しているときには,例えば立てこもり事件などで内部の様子を知りたいときに,蚊のサイズなら飛んでいっても気づかれないなとか,災害や事故で閉じ込められたりして少しの隙間しかない状態でも,ハチとかアブぐらいのサイズなら確認だけでなく,紙に字を書いたものぐらいは届けられたり,状況を言ってもらうと録音して持ち帰れるとか考えていましたが,ロボットのサイズが大きくなってしまって,残念ですがあまり狭い所には入れないとあきらめました(笑)。
しかし,大きくはなっても今のロボットは発電設備や工場,あるいは倉庫の定常点検などに使用できると考えています。福島第一原発の事故以降は,大手企業を含めいろいろな研究機関で危険な場所の情報収集ロボットの開発が進められていますが,うちもその中に入っていけるように一生懸命やっています。
技術的には,何も操縦をしないニュートラルの状態で,その場にとどまるようにすることが,長年のテーマになっています(図5)。少しずつ進歩していますが,なかなかうまくいきません。
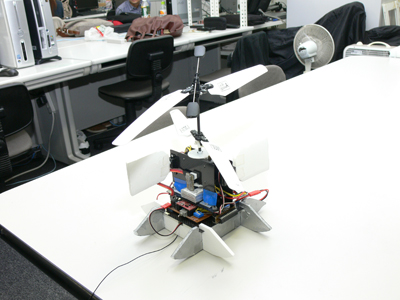
図5 あらたに製作中の飛翔ロボット
いずれにせよ,まだ実験機の域で,やることがたくさんあり過ぎるかと思います。それでも少しずつは進歩していますので,そのうちテレビにでも紹介してもらえるような物ができれば,学生も喜ぶと思います。15年も研究を積み重ねて来たのに,震災があったときにロボットを提供できなかったのが非常に心残りでした。ただこのことで飛翔ロボットの班が奮起しまして,みんな非常に一生懸命取り組んでいます(図6)。
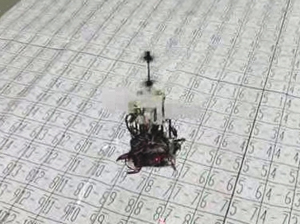
図6 空中静止維持実験中の飛翔ロボット

堀内敏行(ほりうち・としゆき)
1948年 神奈川県生まれ。1970年東京大学工学部機械工学科 卒業。1970年 日本電信電話公社入社。1997年 東京電機大学 工学部 精密機械工学科 教授。現在,東京電機大学 工学部 機械工学科 先端機械コース 教授。●研究分野:光リソグラフィ,マイクロ部品製作技術,小型飛翔ロボット
●現在,電気学会 リソグラフィ次世代技術調査専門委員会 委員長。応用物理学会 シリコンテクノロジー分科会 幹事。精密工学会 代議員。国際シンポジウム フォトマスクジャパン 組織委員会 委員長。















![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)