画像センシングの最前線
ロボットビジョン藤吉弘亘
2. Amazon Picking Challenge
生産現場における部品のピッキングは,ロボットによる自動化が進んでいる。昨今では,このロボットピッキングを物流分野に展開しようという流れが出てきた。米国のAmazon.comは,物流の自動化技術を競うロボット大会「Amazon Picking Challenge(APC)」 (http://amazonpickingchallenge.org) を2015年5 月にシアトルにて初開催した。APCは非構造的環境における自動ピッキング装置の開発を目的としている。ロボットは3列4段の棚の12個のBinの中から指定されたアイテム(25種類)のピッキングを行う。12個のBinにはそれぞれアイテム数が異なるSingle-item bin, Double-item bin, Multi-item binが存在し, Bin内のアイテムを識別してピッキングする必要がある。以下では,このような課題に対する我々のチームC2 M(中部大・中京大・三菱電機(株)の合同チーム)のビジョン戦略と手法について述べる。産業用ロボットによるピッキング
チームC2 Mのピッキングロボットは,三菱電機(株)製の産業用アーム型ロボットMELFAに作業台(1軸)を組み合わせた機構を持つ。図1に示すように,ロボットアームは作業スペースを1自由度で移動し,ロボットハンドはグリッパ型で,移動3自由度+回転1自由度の計4自由度に基づいて把持を行う。また, アイテム毎に適したサイズのロボットハンドへの換装や, 棚の奥のアイテムに対する掻き出しを目的とする孫の手形状のハンドの装着など, 産業用ロボットの精密な動作を生かした行動戦略をとった。ビジョンセンサは,改良したMELFA-3D VISIONを用い,RGB画像と同時に空間コード化法により距離画像を取得する。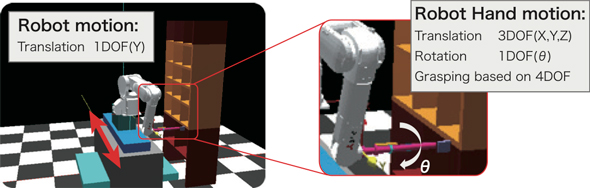
把持のためのビジョン戦略
対象となるアイテムは, 下図のように(a)角張ったもの,(b)角張ったもの+非透明,(c)透明の三つのカテゴリに分類できる。これらの異なる種類のアイテムを,一つのビジョンアルゴリズムで認識するのは不可能である。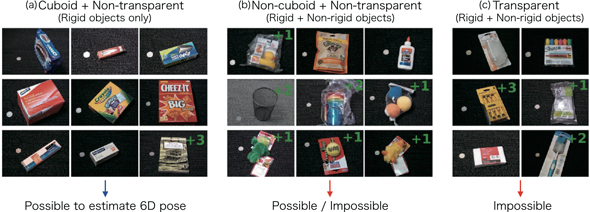
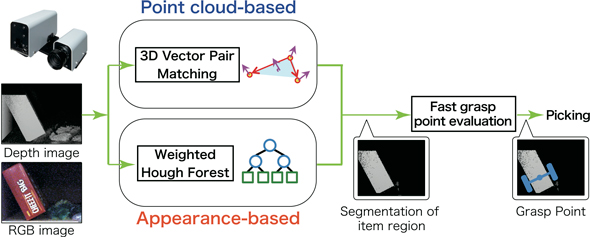
ポイントクラウドベース
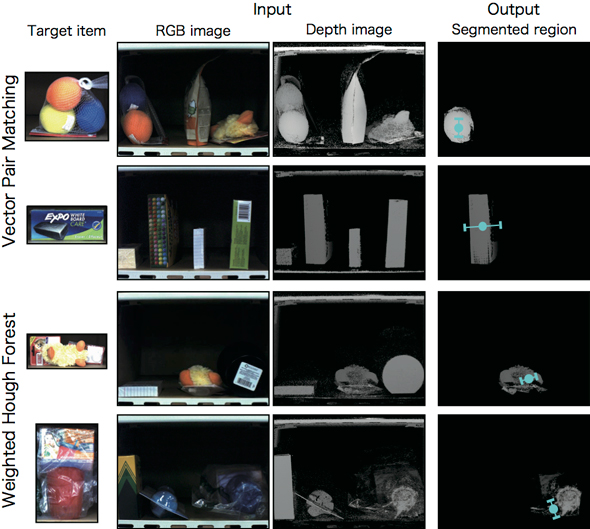
Vector Pair Matchingは,3点の三次元点で構成された視点を共有する2ベクトルをペアとし,ペアの中から安定的に観測可能なペアを選択する。選択されたベクトルペアを用いて投票し,物体重心を推定,モデルフィッティングを行い,物体位置を検出する。S.Akizuki, M.Hashimoto, “Stable Position and Pose Estimation of Industrial Parts using Evaluation of Observability of 3D Vector Pairs”, Journal of Robotics and Mechatronics, Vol.27, No.2, pp.174-181, 2015.
秋月秀一,橋本学,”特徴的3-Dベクトルペアを用いたばら積み部品の高速位置姿勢認識”,電気学会論文誌C,Vol.133,No.9,pp.1853-1854,2013.
アピアランスベース
Weighted Hough Forestは, 学習時に決定木の階層毎にサンプルの重みを更新し, 物体特有のユニークな形状のみを学習し, 類似形状の物体への誤投票を抑制する。認識過程では, ラスタスキャンの際に物体重心位置の投票処理により物体位置を検出する。Y. Murai, Y. Yamauchi T. Yamashita H. Fujiyoshi, “Weighted Hough Forest for object detection”, IAPR International Conference on Machine Vision Applications, pp. 122-125, 2015.
把持位置の決定
前段処理で認識した物体領域から, Fast Graspability Evaluationによりロボットハンドで把持する把持点を決定する。Fast Graspability Evaluationは把持したい物体の形状・種類に関わらず, 高速に把持点の検出が可能である。Y. Domae, H. Okuda et al.: “Fast graspability evaluation on single depth maps for bin picking with general grippers ”, in Proc. of ICRA, pp.1997-2004, 2014.
https://vimeo.com/129655363
APCの優勝は吸着タイプのハンド形状を持つベルリン工科大学で,準優勝は挟持ハンド+吸着ハンド一体型のハンドを持つMITのチームであった。吸着型はグリッパ型と比べて把持位置の検出に正確性を必要としないことから,アイテムの認識が難しいものに有効であった。今回の問題設定は,オクルージョンがないようにアイテムが配置されていることから,あくまでもチャレンジのための問題設定である。今後は,競技内容を現場の実問題に近づけていくことで,実用化への課題と技術の発展が望まれる。来年もAmazon Picking Challenegeは開催される予定であり,日本からも多くのチー ムが参加することを期待している。
<次ページへ続く>

藤吉弘亘
中部大学 工学部 ロボット理工学科 機械知覚&ロボティクス研究グループ












