レーザーで動く“紙ロボ”慶応義塾大学大学院メディアデザイン研究科 安謙太郎, Angela Liu, 小泉直也, 杉本麻樹, 稲見昌彦
- 説明文
- 写真
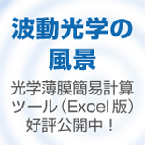
写真は画用紙で作ったパンダの紙工作である。これが初めてでんぐりがえしをした瞬間,私は思わず声を上げてしまった。なぜなら,作った自分でさえ,このパンダがでんぐり返しをできるなどとは思っていなかったからである。
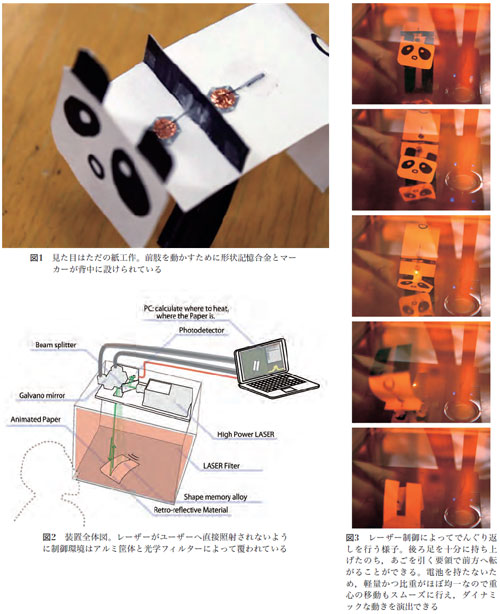
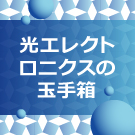
このパンダはAnimated Paper というプロジェクトから誕生した。名前の通り,紙をまるで生きているかのように動かすことを目的としたプロジェクトである。動く紙自体にはバッテリーや配線は一切設けず,アクチュエーターとして形状記憶合金が貼り付けてある。形状記憶合金は直径0.62mm と十分に細いので,紙のもつ軽く,薄いという特徴を損なわずに駆動させることができる。駆動に必要なエネルギーはレーザーを用いて遠隔から供給する。さらに,紙に再帰性反射材を使用したマーカを設けることにより,レーザーは正確に形状記憶合金の位置をとらえ,エネルギーを照射することができる。このシステムにより紙工作に可制御性を与え,ロボットのように操作することができる。でんぐり返しはその一例である。
従来,ロボットと呼ばれるものは,モーター等のアクチュエーターをもち,バッテリーを搭載,もしくは電源とケーブルでつながれ,センサーやチップが配線でつながれることで構成されてきた。しかし,エネルギーを遠隔から非接触に供給するというこの手法により,ロボット自体にバッテリーを搭載する必要がなくなる。さらに,センサーの代わりにマーカーを貼り付けることで,環境からロボットの位置や形状を認識できるので,制御機構や配線も本体に設ける必要がなくなる。するとロボット本体の構成要素として残されるのはアクチュエーター,マーカー,構造体だけとなる。このときアクチュエーターとして細く,軽い形状記憶合金を採用することで,紙のような軽く,弱い素材でも構造体として採用することができるようになる。つまり,電気的制御機構をすべて外在化させたことによる,新しいロボットの姿が,この紙のパンダなのである。
同様の機構で,可制御かつプログラマブルな平面体としてさまざまな応用が考えられる。例えば,壁にかけてあるカレンダーが動いて予定の到来を知らせることが可能になる。また,平面の凹凸を制御することによって,動くスクリーンなども実現できるようになる。さらに,チップの搭載や配線が難しいような顕微鏡下の超微小ロボットとしても応用が考えられる。
中でも紙工作の要領でロボットが組み立てられるという特徴は,電子回路の技術や知識を持たない人でも,より簡易に動くものを作れるツールとしての利用が期待される。私が,最初は単純に歩くパンダを作るつもりが,動かしているうちにそれがでんぐり返しもできることを発見できたように,このシステムが広く一般的になれば,自分の手で作り,動かしてみることで創造力が刺激され,新たなアイデアが生まれるという経験をすべての人に与えることが可能になると考える。
すべての人が自由に創造力を発揮できる社会,その実現への第一歩ならぬ,第一ころがりの瞬間である。
このパンダはAnimated Paper というプロジェクトから誕生した。名前の通り,紙をまるで生きているかのように動かすことを目的としたプロジェクトである。動く紙自体にはバッテリーや配線は一切設けず,アクチュエーターとして形状記憶合金が貼り付けてある。形状記憶合金は直径0.62mm と十分に細いので,紙のもつ軽く,薄いという特徴を損なわずに駆動させることができる。駆動に必要なエネルギーはレーザーを用いて遠隔から供給する。さらに,紙に再帰性反射材を使用したマーカを設けることにより,レーザーは正確に形状記憶合金の位置をとらえ,エネルギーを照射することができる。このシステムにより紙工作に可制御性を与え,ロボットのように操作することができる。でんぐり返しはその一例である。
従来,ロボットと呼ばれるものは,モーター等のアクチュエーターをもち,バッテリーを搭載,もしくは電源とケーブルでつながれ,センサーやチップが配線でつながれることで構成されてきた。しかし,エネルギーを遠隔から非接触に供給するというこの手法により,ロボット自体にバッテリーを搭載する必要がなくなる。さらに,センサーの代わりにマーカーを貼り付けることで,環境からロボットの位置や形状を認識できるので,制御機構や配線も本体に設ける必要がなくなる。するとロボット本体の構成要素として残されるのはアクチュエーター,マーカー,構造体だけとなる。このときアクチュエーターとして細く,軽い形状記憶合金を採用することで,紙のような軽く,弱い素材でも構造体として採用することができるようになる。つまり,電気的制御機構をすべて外在化させたことによる,新しいロボットの姿が,この紙のパンダなのである。
同様の機構で,可制御かつプログラマブルな平面体としてさまざまな応用が考えられる。例えば,壁にかけてあるカレンダーが動いて予定の到来を知らせることが可能になる。また,平面の凹凸を制御することによって,動くスクリーンなども実現できるようになる。さらに,チップの搭載や配線が難しいような顕微鏡下の超微小ロボットとしても応用が考えられる。
中でも紙工作の要領でロボットが組み立てられるという特徴は,電子回路の技術や知識を持たない人でも,より簡易に動くものを作れるツールとしての利用が期待される。私が,最初は単純に歩くパンダを作るつもりが,動かしているうちにそれがでんぐり返しもできることを発見できたように,このシステムが広く一般的になれば,自分の手で作り,動かしてみることで創造力が刺激され,新たなアイデアが生まれるという経験をすべての人に与えることが可能になると考える。
すべての人が自由に創造力を発揮できる社会,その実現への第一歩ならぬ,第一ころがりの瞬間である。















![研究室探訪vol.30 [奈良先端科学技術大学院大学 サイバネティクス・リアリティ工学研究室]](https://www.adcom-media.co.jp/wp-content/themes/adcom/scripts/timthumb.php?src=/wp-content/uploads/2022/11/laboratory1.jpg&w=80&h=100&zc=1&q=100)